ربات ساخت و ساز
گروهی از محققین ژاپنی به تازگی مدلی مفهومی از یک ربات با قابلیت انجام عملیات ساخت و ساز (عمرانی) ، جهت استفاده در شرایط بحرانی و سخت طراحی و ساخته اند. این ربات دوبازو قابلیت های کاربردی و کنترل بیشتری به نسبت سایر ماشین آلات ساخت و ساز مرسوم و معمولی را داراست.
در مناطق پرمخاطره و یا شرایط سخت، استفاده از تجهیزات ساخت و ساز خودکار و با قابلیت کنترل از راه دور امری بسیار ضروری و کاربردی است. اما تجهیزات ساخته شده به این منظور همواره معایبی نیز داشته اند ، معایبی نظیر، سنگین بودن، کنترل پذیری ناکافی ، عدم توانایی در انجام کارهای سنگین، کاهش کارایی در مقابل موانعی همچون مناطق با شیب زیاد و یا برخورد با پله ها و از همه مهمتر کارآمدی پایین دستگاه در کنترل کردن آن از راه دور، بخشی از این معایب است. برای حل چنین معایبی، راه حلی اساسی ، مورد بررسی قرار گرفته است.
محققین چند دانشگاه ژاپنی با تشکیل گروهی متخصص، خود را وارد چالشی جدید نموده اند ، چالشی که هدف آن طراحی و ساخت رباتی با حذف کلیه معایب گفته شده است.
این گروه ، راه حل را در طراحی و ساخت نمونه ای اولیه از رباتی با دو بازوی هیدرولیکی دست مانند ، یافته اند. آنها با ساخت این ربات سعی می کنند کارآیی و حرکت را به طرز چشمگیری افزایش دهند . بازوی دوگانه این ربات می تواند برای انواع شرایط مانند حمل و جابجایی اشیاء سنگین و انجام عملیات حفاری و خاکبرداری، استفاده شود. ربات ساخته دارای توانایی های زیر است:
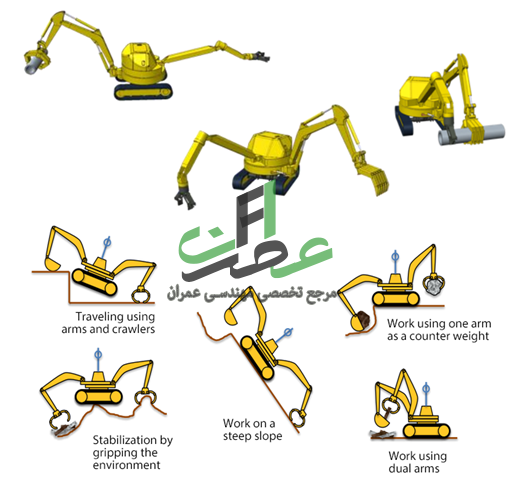
۱- به کمک مکانیزم بازوهای قدرتمند و کارایی بالای خود ، قابلیت انجام راحت کارهای سنگین را داشته و همچنین قابلیت حرکت در مناطق با دامنه های شیب دار و یا پلکانی را داراست. در مکانیک بازوی دوگانه این ربات، بازوی راست و چپ آن و بخش دوار شانه هایش در یک محور قرار دارند. از این رو، ربات می تواند در حمل و جابجایی مواد و اجسام استفاده شود.
همچنین به دلیل نزدیکی بازوها به مرکز جرم ربات، درجه پایداری بالایی را برای آن به ارمغان آورده است. استفاده از این نوع ساختار ، باعث شده است که ربات بتواند بارهای زیادی را حمل و جابجا نموده و وظایف سنگین تری رو انجام دهد. افزون بر این، از آنجایی که بازوها دارای محور مشترکی بوده و می توانند بصورت ۳۶۰ درجه و کامل چرخش کنند، بین دست راست و چپ هیچ تفاوتی وجود ندارد، و به کاربر اجازه می دهد تا آزادانه دست مورد استفاده را تغییر دهد.
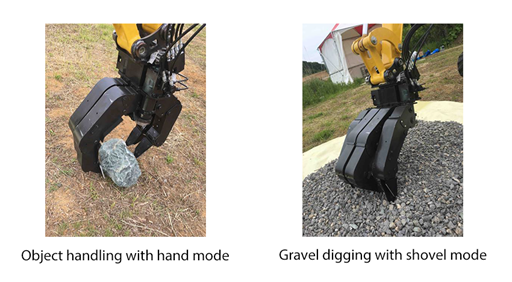
۲- دست چند انگشتی برای ربات ساخت و ساز
تیم تحقیق و توسعه، یکی از یازوها رو بصورت چند انگشتی طراحی و ساخته اند، هدف از انجام این کار ، انجام عملیات مختلف نظیر حفاری و گرفتن یا برداشتن اجسام بوده که انجام هر یک از عملیات مورد با استفاده از تغییر شکل دست امکان پذیر است. همچنین با تغییر شکل اجسام ، امکان تغییر دست به جهت افزایش قدرت کنترل امکان پذیر است.
۳- استفاده از فناوری برای ایجاد قابلیت کنترل از راه دور
این ربات قابلیت کنترل از راه دور توسط یک اپراتور را داراست به نحوی که در حین انجام کار، اپراتور دقیقا حالت های لمس کردن و نیرو واردن کردن را به صورت واقعی احساس می کند. این ربات به یک هواپیمای بدون سرنشین (پهباد) مجهز شده است، که اجازه می دهد، اپراتور اشیا و عوارض زمین را از زاویای مختلف ، مشاهد کند و به این ترتیب نیازی به نصب دوربین بر روی خود ربات نخواهد بود. همچنین ربات مجهز به یک سیستم ترکیب عکس به نام چشم پرنده “bird’s-eye” است. مجموع این تجهیزات به ربات کمک خواهد نمود که وظایف خود را با دقت بیشتر انجام داده و از مناطق صعب العبور به راحتی عبور کند.
محققان و سازندگان این ربات در پی آن هستند که با انجام آزمایش های بیشتر و رفع برخی معایب ، بتوانند از آن در شرایط واقعی استفاده نمایند . همچنین آنها امیدوارند که بتوانند با گسترش و تولید آن ، این وسیله را جایگزین تجهیزات ساخت و ساز مرسوم برای شرایط سخت و بحرانی کنند.
شما چه فکر می کنید: نظر خود را در مورد این مقاله ارسال کنید.
منبع: ساینس دیلی
ترجمه شده توسط وب سایت عمران F1
کپی با ذکر منبع و لینک مطلب بلامانع خواهد بود.